| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
╗∙£╩£yįć║═öĄ(sh©┤)ō■(j©┤)╝»ī”ė┌蹊┐║═┐ŲīW(xu©”)▀M▓ĮĘŪ│Żųžę¬Ż¼═©▀^Ėé╝╝╝░┐╔┴┐╗»Īó┐╔ųžÅ═(f©┤)ąįĮY(ji©”)╣¹═ŲäėĻP(gu©Īn)µI蹊┐ŅI(l©½ng)ė“▀M▓ĮĪŻÖCŲ„╚╦▓┘ū„─┐Ū░╚▒Ę”į┌═¼Ą╚ęÄ(gu©®)─Ż╝░ųžę¬ŅI(l©½ng)ė“▒╗ÅVĘ║Įė╩▄Ą─╗∙£╩Ż¼└²╚ńėŗ╦ŃÖCęĢėXųąĄ─═¼▓ĮČ©╬╗║═ė│╔õŻ©SLAMŻ®║═─┐ś╦Öz£yĪŻį°Įø(j©®ng)╠ß│÷Ą─▓┘ū„╗∙£╩║═╠¶æ(zh©żn)ąĶę¬įLå¢░║┘FĄ─ŲĮ┼_║═īŻķTĄ─Łh(hu©ón)Š│Ż©╝┤FetchItĪóAmazon Picking ChallengeĄ╚Ż®Ż¼╩╣ė├╠žėąī”Ž¾üĒįu╣└ŽĄĮy(t©»ng)Ą──▄┴”Ż¼Ž▐ųŲ┴╦š¹éĆ蹊┐ŅI(l©½ng)ė“Ą─░l(f©Ī)š╣ĪŻÖCŲ„╚╦▓┘ū„ĘĮ├µčąŠ┐į┌Ę┬šµŁh(hu©ón)Š│ųą▀MąąŠ▀éõā×(y©Łu)ä▌░³└©Ż║Ż©1Ż®ėąų·ė┌½@Ą├┐╔ųžÅ═(f©┤)Ą─ĮY(ji©”)╣¹Ż¼Ż©2Ż®į╩įSįLå¢Øōį┌Ą─▓╗┐╔ė├ŲĮ┼_Ż¼Ż©3Ż®▒Š┘|(zh©¼)╔Ž╩Ū░▓╚½Ą─Ż¼Ż©4Ż®▓╗Ģ■─źōp╗“ōpē─╬’└ĒŽĄĮy(t©»ng)Ż¼▓óŪꯩ5Ż®│²┴╦▓óąą▀\ąąįSČÓīŹ└²ų«═ŌŻ¼▀Ć┐╔ęį▒╚īŹĢr▀\ąąĖ³┐ņĪŻ╚╗Č°Ż¼╬’└Ē─ŻöMĄ─▓╗ūŃę▓║▄├„’@Ż¼į┌Ę┬šµŁh(hu©ón)Š│ųą╔·│╔Ą─┐žųŲŲ„į┌▐D(zhu©Żn)ęŲĄĮ¼F(xi©żn)īŹ╩└ĮńĢr═∙═∙╩Ū▓╗┐╔┐┐Ą─ĪŻ¼F(xi©żn)īŹ▓ŅŠÓĄ─¼F(xi©żn)Ž¾╩Ū▒Ŗ╦∙ų▄ų¬Ą─Ż¼Ą½║▄╔┘ėą╚╦─▄┴┐╗»▀@ę╗▓ŅŠÓĪŻ
Į³Ų┌IEEE ROBOTICS AND AUTOMATION LETTERS░l(f©Ī)▒Ē┴╦Ī░Benchmarking simulated robotic manipulation through a real worlddatasetĪ▒, ╠ß│÷Ą─╗∙£╩║═ĖĮī┘öĄ(sh©┤)ō■(j©┤)╝»ų╝į┌Ä═ų·čąŠ┐╚╦åT║═ķ_░l(f©Ī)╚╦åT┴┐╗»¼F(xi©żn)īŹ▓ŅŠÓŻ¼╠žäe╩Ū┼cÖCąĄ▒█Ą─╬’└ĒĮ╗╗ź╚╬äš(w©┤)Ż¼Å─Č°═ŲäėĘ┬šµĄĮ¼F(xi©żn)īŹŻ©sim2realŻ®Ą─▐D(zhu©Żn)ōQŻ¼ęį╝░╬’└Ēę²ŪµŻ¼─ŻöMŲ„║═╦³éāĄ─ģóöĄ(sh©┤)╗»ĘĮ├µĄ─▀Mš╣ĪŻ═©▀^╩╣ė├Ę┬šµ║═┴┐╗»ųĖś╦Ż¼╩╣╗∙£╩£yįć─▄ē“═©ė├ė┌įSČÓ▓┘ū„ŅI(l©½ng)ė“Ż¼Ą½ėųūŃē“Š▀¾wŻ¼─▄ē“╠ß╣®ŽĄĮy(t©»ng)Ą─ėąĻP(gu©Īn)ą┼ŽóĪŻ╦¹éāĄ─ų„꬞Ģ½I░³└©Ż║Ż©1Ż®ķ_░l(f©Ī)┴╦ę╗éĆīóĘ┬šµ┼cšµīŹ╩└Įńėøõø▀Mąą▒╚▌^Ą─│╠ą“Ż╗Ż©2Ż®ę╗éĆė╔ÖCąĄ╩ųł╠(zh©¬)ąąĄ─Ąž├µšµīŹś╦ėø▓┘ū„╚╬äš(w©┤)Ą─öĄ(sh©┤)ō■(j©┤)╝»Ż¼įō▓┘ū„╚╬äš(w©┤)╩╣ė├Ė▀Š½Č╚Ą─▀\äė▓ČūĮŽĄĮy(t©»ng)▀MąąėøõøŻ╗Ż©3Ż®į┌į┘¼F(xi©żn)šµīŹĘĮ├µė├ė┌├Ķ╩÷─ŻöMŲ„│╔╣”┴┐Ą─ūė╝»Ż©łD1Ż®ĪŻū„š▀éāŽŻ═¹ļSų°ĢrķgĄ─═ŲęŲüĒöUš╣▀@éĆöĄ(sh©┤)ō■(j©┤)╝»Ż¼ęįĖ▓╔wĖ³ČÓĄ─╚╬äš(w©┤)Ż¼▓óæ¬(y©®ng)ė├ė┌Ė³ČÓĄ─ÖCąĄ╩ųĪŻ
1Īó╗∙£╩£yįć
▓┘ū„╗∙£╩ė╔╚²éĆ▓┐ĘųĮM│╔Ż║▀\äė▓ČūĮ╚╬äš(w©┤)Ą─šµīŹ╩└ĮńöĄ(sh©┤)ō■(j©┤)╝»Ż╗Č©┴xį┌▀xČ©Ą──ŻöMŁh(hu©ón)Š│ųąę¬─ŻöMĄ─╚╬äš(w©┤)Ż╗įu╣└Ąž├µšµīŹąį║═─ŻöMĮŌøQĘĮ░Ėų«ķgąį─▄Ą─ųĖś╦ĪŻ
A. ╚╬äš(w©┤)
įō╗∙£╩─┐Ū░ė╔10éĆ║åå╬Ą─╚╬äš(w©┤)ĮM│╔Ż¼▀@ą®╚╬äš(w©┤)▒╗▀xųą╩Ūę“×ķ╦³éā╠ß╣®┴╦╗∙▒Š▀\äė║═Įėė|Ą─┴╝║├│§╩╝Ų³cĪŻ▀@ą®╚╬äš(w©┤)č▌╩Š┴╦╚ń║╬╩╣ė├╗∙£╩▓ó│õ«öĖ³Ė▀╝ē╚╬äš(w©┤)Ą─Ž╚“ī(q©▒)ĪŻ═©▀^š{(di©żo)š¹─ŻöMŲ„üĒŠ½┤_Ąž─ŻöM║åå╬Ą─╚╬äš(w©┤)Ż¼═ŲöÓ▀@ą®ŽÓ═¼Ą─ģóöĄ(sh©┤)īóöUš╣ĄĮ╣▓ŽĒĄūīėĻP(gu©Īn)┬ō(li©ón)Ą─Ė³Å═(f©┤)ļsĄ─ł÷Š░ĪŻ╗∙£╩īó▒╗öUš╣ĄĮ░³└©Ė³Ė▀╝ēĄ─╚╬äš(w©┤)Ż¼▀@ą®╚╬äš(w©┤)┼cīŹļH▓┘ū„ł÷Š░Š▀ėąĖ³Ė▀Ą─ŽÓĻP(gu©Īn)ąįĪŻ▒Ē1┴ą│÷┴╦╚╬äš(w©┤)ęį╝░║åČ╠Ą─├Ķ╩÷ęį╝░╦³éā░³║¼Ą─ūėĮMĪŻ
BĪóöĄ(sh©┤)ō■(j©┤)╝»
öĄ(sh©┤)ō■(j©┤)╝»╩Ūį┌CSIROĄ─Qualisys▀\äė▓ČūĮŽĄĮy(t©»ng)ųą╩š╝»Ą─Ż¼īóŲõū„×ķīŹĢrĖ▀Š½Č╚Ąž├µšµīŹöĄ(sh©┤)ō■(j©┤)╠ßĮ╗ĪŻįōŽĄĮy(t©»ng)░³└©24éĆözŽ±Ņ^Ż¼░▓čbį┌8Ī┴8Ī┴4├ūĄ─²łķT╝▄╔ŽĪŻąŻ£╩×ķ<1 mmĄ─ÜłėÓųĄŻ¼ŽĄĮy(t©»ng)ėøõøŅl┬╩×ķ100 HzĪŻŽĄĮy(t©»ng)Ą─čė▀t╚ĪøQė┌ęįŽ┬ÄūéĆūā┴┐Ż║ś╦ėøöĄ(sh©┤)ĪóözŽ±ÖCöĄ(sh©┤)║═ėŗ╦ŃÖCįO(sh©©)ų├ĪŻöĄ(sh©┤)ō■(j©┤)Å─ų„ÖCPCŻ©Įė╩ščė▀tąĪė┌6║┴├ļĄ─öĄ(sh©┤)ō■(j©┤)Ż®┴„ĄĮ▀\ąąÖCŲ„╚╦▓┘ū„ŽĄĮy(t©»ng)Ż©ROSŻ®Ą─Ą┌╚²ĘĮPCĪŻ╩ų▒█┼õéõėąRobotiq FT300┴”┼żŠžé„ĖąŲ„Ż¼░▓čbį┌╩ų▒█╩ų═¾║═ŖA│ųŲ„ų«ķgŻ¼╩╣ė├ā╔éĆ╚ńłD2╦∙╩ŠĄ─3D┤“ėĪĄūū∙Ż©Ąūū∙Ą─ŠW(w©Żng)Ė±╬─╝■┐╔ęįį┌╗∙£╩ŠW(w©Żng)šŠ╔ŽšęĄĮŻ®ĪŻ░▓čbų¦╝▄▓╔ė├äéąį║═▌p┘|(zh©¼)Ą─ABS╦▄┴Ž▀Mąą3D┤“ėĪŻ¼▀@ØMūŃ┴╦ū„×ķŽĄĮy(t©»ng)ūŅĮKŁh(hu©ón)╣Ø(ji©”)Ą─įO(sh©©)ėŗę¬Ū¾Ż¼░³└©ųž┴┐ąĪė┌1.2 kgĄ─ŖA│ųŲ„ĪŻį┌ėøõøöĄ(sh©┤)ō■(j©┤)╝»ų«Ū░Ż¼Robotiq FT300ė├KinovaŖAŠ▀▀Mąą┴╦ąŻ£╩ĪŻįōöĄ(sh©┤)ō■(j©┤)╝»Ą──┐Ą─╩Ūį┌╬┤üĒ═©▀^ę╗ŽĄ┴ąĄ─ÖCŲ„╚╦▓┘ū„Ų„═Ļ│╔Ņ~═ŌĄ─╚╬äš(w©┤)ĪŻ╗∙£╩£yįćĄ─ė├æ¶▓╗▒žėøõø╚╬äš(w©┤)Ż¼─┐Ą─╩Ūė├æ¶æ¬(y©®ng)ė├╦∙╠ß╣®Ą─öĄ(sh©┤)ō■(j©┤)╝»ī”Ųõ─ŻöMŁh(hu©ón)Š│▀Mąą╗∙£╩£yįćĪŻ
CĪó─ŻöMŲ„įO(sh©©)ų├
ę¬╩╣ė├╬─ųąĄ─╗∙£╩£yį接Įy(t©»ng)ī”─ŻöMŲ„▀Mąą╗∙£╩£yįćŻ¼▒žĒÜū±čŁęįŽ┬£╩ätĪŻ╚╬║╬╬┤┴ą×ķ╩▄┐žūā┴┐Ą─ģóöĄ(sh©┤)Č╝┐╔ęįė├üĒĖ─▀MĘ┬šµĪŻę╗░ŃüĒšfŻ¼ł÷Š░ĪóÖCŲ„╚╦║═ÖCŲ„╚╦Ą─┐žųŲČ╝įO(sh©©)ų├×ķ▓╗┐╔ūāŻ¼Č°┤¾ČÓöĄ(sh©┤)Ųõ╦¹ģóöĄ(sh©┤)Č╝╩Ūė├æ¶┐╔Č©┴xĄ─ĪŻ╬─ųąĄ─╗∙£╩▀mė├ė┌╚╬║╬─ŻöMŲ„ĪŻųŲįņ╔╠Įy(t©»ng)ę╗ÖCŲ„╚╦├Ķ╩÷Ė±╩ĮŻ©URDFŻ®┼cŠW(w©Żng)Ė±╬─╝■┐╔ęįę╗Ųį┌╗∙£╩Ą─ŠW(w©Żng)šŠ╔ŽŽ┬▌dŻ¼ū„×ķÖCŲ„╚╦ÖCąĄ╩ųĄ─├Ķ╩÷ĪŻ╚ń╣¹─ŻöMŲ„▒Š╔Ē▓╗ų¦│ųURDFŻ¼ätÖCŲ„╚╦┐╔ęį░┤ššURDF╗“ųŲįņ╔╠ęÄ(gu©®)ĘČī¦(d©Żo)╚ļäé¾wŠW(w©Żng)Ė±Ż¼į┌▀xČ©Ą─Ę┬šµŁh(hu©ón)Š│ųą▀MąąĮMčbĪŻ
DĪóąį─▄ųĖś╦
ø]ėąę╗éĆųĖś╦─▄ē“┐═ė^Ąžįu╣└─ŻöMŲ„į┌╦∙ėą╚╬äš(w©┤)ųąĄ─ąį─▄Ż¼ę“┤╦╠ß│÷┴╦ę╗ŽĄ┴ąĄ─ųĖś╦ĪŻį┌═Ųī¦(d©Żo)║Ž▀mĄ─ąį─▄ųĖś╦ĢrŻ¼ūóęŌĄĮŲĮŠ∙ę╗éĆŠ▀ėąŽÓ═¼Ų³c║═ĮK³cĄ─ī”Ž¾Ą─▄ē█E╩Ū┐╔─▄Ą─Ż¼╠žäe╩Ūī”ė┌ū±čŁŽÓ═¼┐žųŲ▄ē█EĄ─ī”Ž¾Ż¼╚ńÖCąĄ╩ųĪŻ╚╗Č°Ż¼ī”ė┌Š▀ėą▓╗═¼─®Č╦ū╦æB(t©żi)Ą─╬’¾wŻ¼Ū¾Ųõ▄ē█EĄ─ŲĮŠ∙ųĄ▓╗╩Ūę╗éĆėąą¦Ą─ėŗ╦ŃĘĮĘ©Ż¼ę“┤╦Į©ūhĘų╬÷▀@ą®╬’¾w─®Č╦ū╦æB(t©żi)Ą─Ęų▓╝ĪŻė╔ė┌į┌ū±čŁ╬’└ĒįŁ└ĒĄ─═¼ĢrŻ¼ė╔ė┌Å─ę╗éĆ╣▓═¼Ą─ķ_╩╝ū╦ä▌ĄĮĮY(ji©”)╩°ū╦ä▌Ą─▀^│╠ųąŻ¼┐╔ąąĘĮĘ©╩ŪėąŽ▐Ą─Ż¼═©▀^Ęų╬÷┐╔▓┘┐v╬’¾wĄ──®Č╦ĮY(ji©”)śŗ(g©░u)Ż¼╬ęéā░l(f©Ī)¼F(xi©żn)▀@╩Ūę╗éĆėąą¦Ą─Č╚┴┐ś╦£╩ĪŻ┤╦═ŌŻ¼▀Ć╩╣ė├▀Mę╗▓ĮĄ─Č╚┴┐üĒ▒Ēš„▀@ą®ī”Ž¾Ą─▀\äėĪŻ
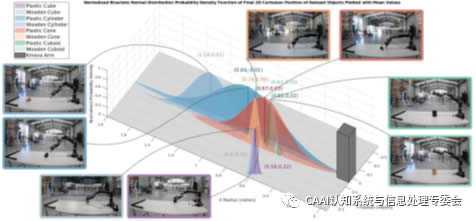
łD3 Č■į¬š²æB(t©żi)Ęų▓╝Ė┼┬╩├▄Č╚║»öĄ(sh©┤)Ą─╚²ŠS└LłD
EĪół¾Ėµ┐āą¦
ĮM║Ž╗∙£╩║═öĄ(sh©┤)ō■(j©┤)╝»Ą─ŠW(w©Żng)šŠų╝į┌═ą╣▄╗∙£╩ė├æ¶Ą─ĮY(ji©”)╣¹ĪŻė╔ė┌░³║¼┐╔▓┘ū„ī”Ž¾Ą─╚╬äš(w©┤)ėą23éĆČ╚┴┐Ż©▓╗░³║¼ī”Ž¾Ą─╚╬äš(w©┤)ėą15éĆČ╚┴┐Ż®Ż¼ę“┤╦ėą╠½ČÓĄ─Č╚┴┐¤oĘ©╣½ķ_’@╩Š║═▒╚▌^Ż¼ę“┤╦┐╔─▄Ģ■╩╣ė├Õeš`ĪŻ╚╬äš(w©┤)Ė∙ō■(j©┤)ų„Ņ}äØĘų×ķČÓéĆūėĮMŻ¼▓ół¾ĖµūėĮMĄ─ĮY(ji©”)╣¹ĪŻūėĮMĄ─ł¾ĖµĮY(ji©”)╣¹’@╩ŠĖ³Š▀ėąßśī”ąį▒╚═Ļ│╔╦∙ėą╚╬äš(w©┤)║═ų╗ł¾Ėµå╬éĆ╚╬äš(w©┤)Ė³ėąą¦┬╩ĪŻ
2Īó─ŻöMŲ„ąį─▄╩Š└²╝░ĮY(ji©”)šō
╬─ųąæ¬(y©®ng)ė├┴╦ā╔éĆĘ¹║ŽÖCŲ„╚╦ąį─▄Ą──ŻöMŲ„V-Rep║═PyBulletĪŻ╦³éāę▓╩ŪÖCŲ„╚╦ŅI(l©½ng)ė“│Żė├Ą──ŻöMŲ„ĪŻ▀\ąą┤╦╗∙ŠĆĄ─┤·┤a┐╔ęįį┌╗∙£╩ŠW(w©Żng)šŠ╔ŽšęĄĮĪŻV-Repėąę╗ŽĄ┴ą╬’└Ēę²ŪµŻ¼┐╔ęį═©▀^│ķŽ¾īėæ¬(y©®ng)ė├Ż¼ę“┤╦─▄ē“?q©▒)”ęįŽ┬─ŻöMŲ„║═╬’└Ēę²ŪµĮM║Ž▀Mąą╗∙£╩£yįćĪŻĘ┬šµÖCŲ„╚╦▓┘ū„╗∙£╩═©▀^į┌Ę┬šµ║═Ąž├µšµīŹöĄ(sh©┤)ō■(j©┤)╝»ų«ķg└LųŲČ╚┴┐üĒ“×ūCĘ┬šµŁh(hu©ón)Š│ĪŻ23éĆųĖś╦╚½├µ├Ķ╩÷┴╦¼F(xi©żn)īŹ▓ŅŠÓįņ│╔Ą─▓Ņ«ÉŻ¼▓óėąų·ė┌ī”Ę┬šµŁh(hu©ón)Š│Ą─ĮY(ji©”)╣¹▀Mąą╗∙£╩£yįćĪŻįōöĄ(sh©┤)ō■(j©┤)╝»╠ß╣®┴╦ėąārųĄĄ─ą┼ŽóŻ¼░³└©6ūįė╔Č╚ū╦æB(t©żi)Ą─▀\äė▓ČūĮĪóĻP(gu©Īn)╣Ø(ji©”)┼żŠžęį╝░į┌ÖCąĄ╩ų╩ų═¾╠ÄĄ─┴”║═┴”ŠžĪŻ═¼Ģr▒╚▌^┴╦ā╔ĘN│Żė├Ą─ÖCŲ„╚╦─ŻöMŲ„V-Rep║═PyBulletį┌ę╗░ŃģóöĄ(sh©┤)įO(sh©©)ų├Ž┬Ą─ąį─▄Ż¼╗∙ė┌Č╚┴┐Ęų╬÷┴╦─ŻöMŲ„į┌═Ļ│╔öĄ(sh©┤)ō■(j©┤)╝»╚╬äš(w©┤)ĢrĄ─Š½Č╚Ż¼ūC├„┴╦╦∙▀xČ╚┴┐Ą─īŹė├ąįĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬(y©®ng)ė├ ųŪ─▄ßt(y©®)»¤ ╬’┬ō(li©ón)ŠW(w©Żng) ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI(y©©) ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l(f©Ī) ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |